EEM Application on OpenMoko
EEM is a proof of concept application (a simple UI showing an app launcher/menu) developed by Rasterman to run Enlightenment libraries on an embedded device (demo video of EEM on ipaq is here).
But this application doesnt run properly with the latest version of EFL core libraries (DR17) in OpenMoko. So I have modified the application to run properly with the latest EFL libraries and here is the patch file for the same.
Kompazz: Some more screenshots of KompazzVG
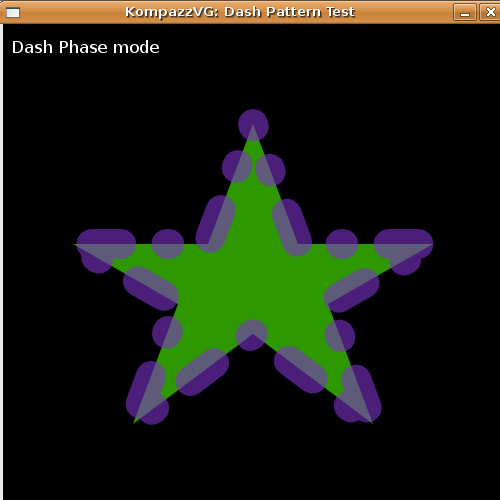
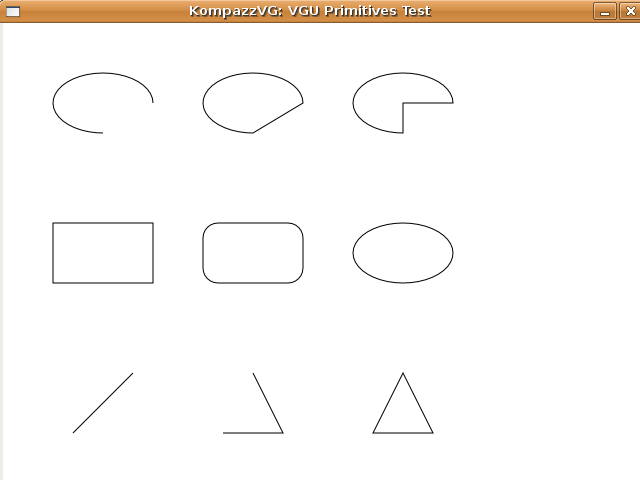
Its quite a long time since have provided any updates about KompazzVG. Hope the following screenshots of some test applications running on KompazzVG details the progress of KompazzVG.
1. Clock

2. Subway Map

3. Lion

4. Tiger with Scissoring

5. Line Stroking

6. Simple Path Stress Test

7. Compositing

8. Flowers

8. Image Wrapping (Perspective Transform)

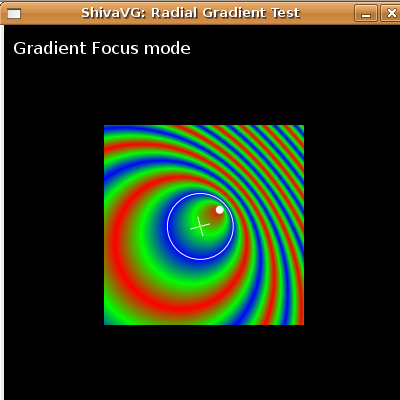
9. Radial Gradient







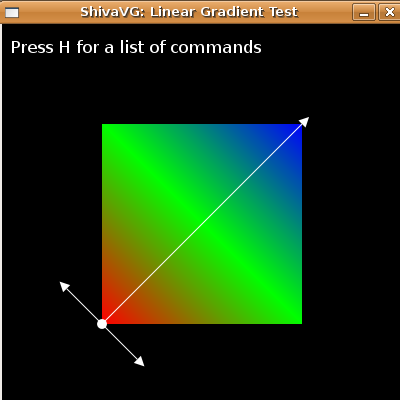
10. Linear Gradient



11.Image Pattern

12. Image Pattern 2




13. Blending





Kompazz: Some Screenshots of KompazzVG
Some screenshots of KompazzVG running various test cases related to paths and gradients from shivaVG. All the test cases run properly with almost no changes.
My thanks again to ShivaVG project for those test cases.

Kompazz – Status Update
As planned, I completed the coding of Alpha Masking, Scissoring, vgImage last week but delayed the eglsurface for evas implementation because I am not going to use it currently.
This week, the focus will be on testing and will try to execute most of the test cases/samples openly available from other openvg implementations like PowerVR SDK, Hybrid, shivaVG etc. Additionally, I will write some test cases on needed basis.
KompazzVG and ShivaVG
Since I am not an OpenVG/graphics expert, I needed some reference OpenVG Implementation to validate my implementation and compare the rendering quality. I didnt consider the OpenVG RI because its a windows based implementation and I expect the rendering quality to be bad (just an instinct).
Other than the RI, ShivaVG is one complete good quality open source implementation which I found interesting because it uses OpenGL as the base rendering engine and also has a good amount of OpenVG test code.
Here’s the SVG tiger rendered using KompazzVG and ShivaVG. Thanks to Irvin of ShivaVG for his test code.


PS: Note that KompazzVG and ShivaVG implementations take different approaches.

leave a comment